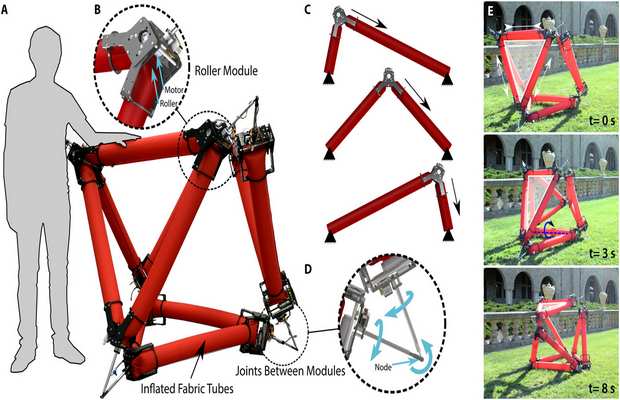
Исследователи из Стэнфордского университета разработали новый тип гибкого робота, который во время передвижения меняет форму, сохраняя общую длину ребер.
Технически это целая группа микромашин, коллективно управляющих системой надувных трубок. Они формируют из нее треугольники с разными углами, перемещая воздух в замкнутом пространстве.
Каждая микромашина движется вдоль трубки, работая как роликовый (прокатный) насос. Изопериметрический робот не требует постоянной подкачки, а значит – не привязан к компрессору.
Потенциальные сферы его применения – участие в спасательных операциях на суше и море, а также исследования других планет. Робот достаточно компактный при транспортировке и в принципе не может опрокинуться.
Недостаток типичен для прототипа: низкая скорость передвижения. Видео ускорено в четыре раза в оригинальном ролике.
Подробнее можно ознакомиться (на английском языке) тут.



Комментариев пока нет
Оставьте свой комментарий, для нас важно Ваше мнение
Комментарии